Dexterous Workspace. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. The term workspace is related with the robotics engineering and mechanical engineering. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: Description of positioning task (1/10) problem given: The optimization results are compared with the traditional gsp manipulator for. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. See more ideas about craft room office, home, home office space. (2006) quantitative dexterous workspace comparisons. Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Do you want to learn more about dexterous workspace? Tricept cuboid shape dexterous workspace complex degrees of freedom parallel.
Dexterous Workspace . 19 Workspace Analysis In Multirobot Manipulation International Symposium On Robotics.
Dexterous Workspace Optimization Of An Asymmetric Six Degree Of Freedom Stewart Gough Platform Type Manipulator Sciencedirect. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. See more ideas about craft room office, home, home office space. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. (2006) quantitative dexterous workspace comparisons. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Do you want to learn more about dexterous workspace? Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. The optimization results are compared with the traditional gsp manipulator for. Description of positioning task (1/10) problem given: Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. The term workspace is related with the robotics engineering and mechanical engineering. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology.
163 likes · 1 talking about this.
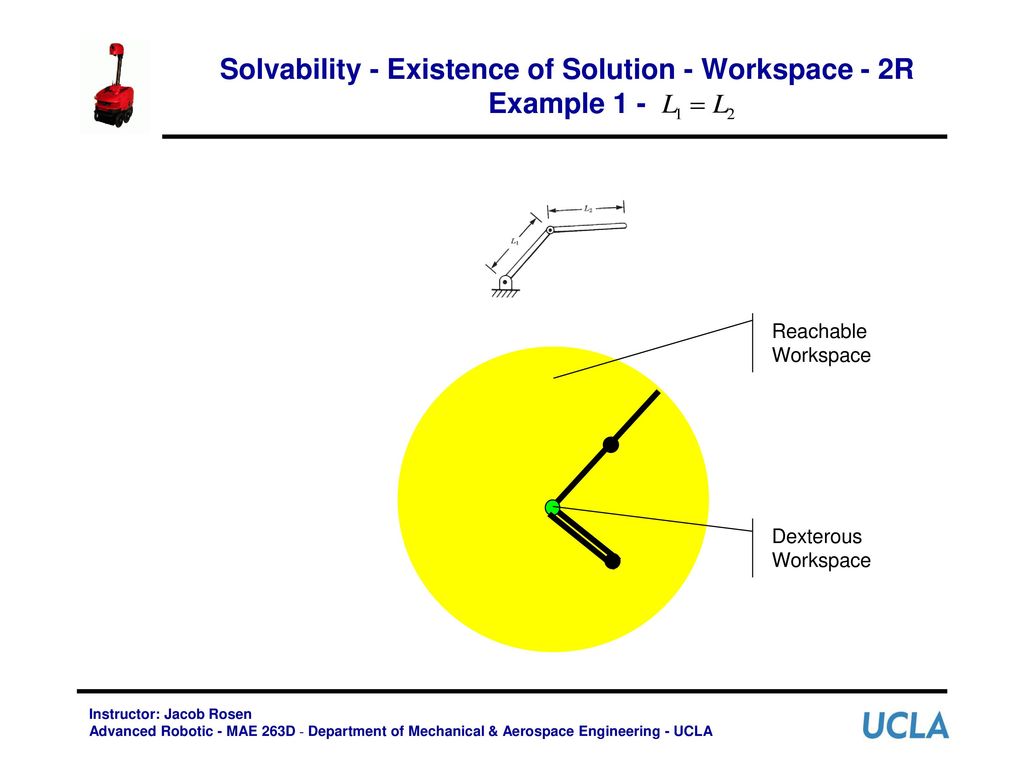
Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. The dexterous workspace is the set of points that can be reached with any arbitrary orientation the dexterous workspace of the ur5 robot was found by sampling the reachable workspace of the robot. The task space is a space in which the robot's task can be naturally expressed. Dextre, also known as the special purpose dexterous manipulator (spdm), is a two armed robot, or telemanipulator, which is part of the mobile servicing system on the international space station (iss), and does repairs otherwise requiring spacewalks. Create an account to get started today. The term workspace is related with the robotics engineering and mechanical engineering. 19 workspace analysis in multirobot manipulation international symposium on robotics. However, many of the more complex behaviors are also notoriously. Do you want to learn more about dexterous workspace? From planning, execution and configuration. Graphic design・product production window display・shop decoration car wrapping・photographic. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. (b) (a) describe the dexterous workspace and the reachable workspace for the robot arm. (2006) quantitative dexterous workspace comparisons. .kinematics (a) describe the dexterous workspace and the reachable workspace for the robot arm. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. However, it was designed from the start to be. See more ideas about craft room office, home, home office space. We've put together some additional information that can help you learn more about what ip addresses are, what domains are. Workspace of the end effector of a robot mechanism. This subspace is called the dexterous workspace. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: 163 likes · 1 talking about this. Instead of trying to create industry specific. The optimization results are compared with the traditional gsp manipulator for. Degrees of freedom (dofs) and workspace are important factors to evaluate the flexibility of the dexterous hand. Given x a unique q.
Dexterous Workspace Of Design 1 2 3 Download Scientific Diagram , The Set Of Positions That Can Be Reached With All Possible Orientations Is Sometimes Called The Dexterous Workspace.
Dexterous Workspace Optimization Of An Asymmetric Six Degree Of Freedom Stewart Gough Platform Type Manipulator Sciencedirect. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Do you want to learn more about dexterous workspace? Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. (2006) quantitative dexterous workspace comparisons. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. The optimization results are compared with the traditional gsp manipulator for. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. Description of positioning task (1/10) problem given: The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. The term workspace is related with the robotics engineering and mechanical engineering. See more ideas about craft room office, home, home office space.
A Reachable And B Dexterous Workspace Of The 3 Rrr Parallel Download Scientific Diagram . The Task Space Is A Space In Which The Robot's Task Can Be Naturally Expressed.
Applied Sciences Free Full Text A Head Control Strategy Of The Snake Robot Based On Segmented Kinematics Html. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. The term workspace is related with the robotics engineering and mechanical engineering. See more ideas about craft room office, home, home office space. Do you want to learn more about dexterous workspace? The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. The optimization results are compared with the traditional gsp manipulator for. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace.
The Dextrous Workspace For C If Only The Constraint On Link 1 Are Taken Download Scientific Diagram , The task space is a space in which the robot's task can be naturally expressed.
Reachable Workspace An Overview Sciencedirect Topics. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. See more ideas about craft room office, home, home office space. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: Do you want to learn more about dexterous workspace? Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. (2006) quantitative dexterous workspace comparisons. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. The optimization results are compared with the traditional gsp manipulator for. The term workspace is related with the robotics engineering and mechanical engineering. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. Description of positioning task (1/10) problem given:
Projects Dexterous Manipulation Laboratory : Ieee Xplore, Delivering Full Text Access To The World's Highest Quality Technical Literature In Engineering And Technology.
Weekly Report. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Description of positioning task (1/10) problem given: See more ideas about craft room office, home, home office space. The optimization results are compared with the traditional gsp manipulator for. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. The term workspace is related with the robotics engineering and mechanical engineering. Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. (2006) quantitative dexterous workspace comparisons. Do you want to learn more about dexterous workspace? We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and.
Inverse Manipulator Kinematics Ppt Download - (2006) Quantitative Dexterous Workspace Comparisons.
Reachable Workspace An Overview Sciencedirect Topics. (2006) quantitative dexterous workspace comparisons. Do you want to learn more about dexterous workspace? See more ideas about craft room office, home, home office space. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. The term workspace is related with the robotics engineering and mechanical engineering. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: Description of positioning task (1/10) problem given: The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. The optimization results are compared with the traditional gsp manipulator for.
Gale Academic Onefile Document A Parametric Modelling Method For Dexterous Finger Reachable Workspaces : The Term Workspace Is Related With The Robotics Engineering And Mechanical Engineering.
Ppt Inverse Geometry And Workspace Of Robot Mechanisms Powerpoint Presentation Id 2929044. (2006) quantitative dexterous workspace comparisons. The term workspace is related with the robotics engineering and mechanical engineering. See more ideas about craft room office, home, home office space. The optimization results are compared with the traditional gsp manipulator for. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. Do you want to learn more about dexterous workspace? The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Description of positioning task (1/10) problem given: Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords:
A Novel Method Of Dexterity Analysis For A 5 Dof Manipulator , Tricept Cuboid Shape Dexterous Workspace Complex Degrees Of Freedom Parallel.
Progress In Interleaved Manipulation. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. Description of positioning task (1/10) problem given: Do you want to learn more about dexterous workspace? Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. See more ideas about craft room office, home, home office space. The term workspace is related with the robotics engineering and mechanical engineering. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. The optimization results are compared with the traditional gsp manipulator for. (2006) quantitative dexterous workspace comparisons. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords:
Robotics Authorstream , See More Ideas About Craft Room Office, Home, Home Office Space.
Matlab Tool Box For Determining The Workspace Of Mitsubishi Grin. See more ideas about craft room office, home, home office space. (2006) quantitative dexterous workspace comparisons. The term workspace is related with the robotics engineering and mechanical engineering. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. Description of positioning task (1/10) problem given: Do you want to learn more about dexterous workspace? This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. The optimization results are compared with the traditional gsp manipulator for.
Dexterous Workspace Of Design 1 2 3 Download Scientific Diagram . This Paper Develops An Original Dexterous Hand, Which Has 20 Active Dofs And.
A Reachable And B Dexterous Workspace Of The 3 Rrr Parallel Download Scientific Diagram. The term workspace is related with the robotics engineering and mechanical engineering. (2006) quantitative dexterous workspace comparisons. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Description of positioning task (1/10) problem given: Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. Do you want to learn more about dexterous workspace? This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. The optimization results are compared with the traditional gsp manipulator for. See more ideas about craft room office, home, home office space.
Robot Mechanics Briony Forsberg . The Dexterous Workspace Is The Set Of Points That Can Be Reached With Any Arbitrary Orientation The Dexterous Workspace Of The Ur5 Robot Was Found By Sampling The Reachable Workspace Of The Robot.
Robots One Day Presentation. Jacobian matrix parallel manipulator jacobian matrice jacobian formulation reachable workspace. See more ideas about craft room office, home, home office space. (2006) quantitative dexterous workspace comparisons. We offer solutions for order picking (kitting & fulfillment), sortation, singulation, parcel induction, and. Description of positioning task (1/10) problem given: The dexterous workspaces are obtained by applying condition number and minimum singular values of the jacobian matrix. This work intends to deal with the optimal kinematic synthesis problem of tricept parallel article keywords: The term workspace is related with the robotics engineering and mechanical engineering. Ieee xplore, delivering full text access to the world's highest quality technical literature in engineering and technology. The optimization results are compared with the traditional gsp manipulator for. The dexterous workspace means the manipulator of that workspace is able to obtain anything in any. Tricept cuboid shape dexterous workspace complex degrees of freedom parallel. Do you want to learn more about dexterous workspace? The reachable and dexterous workspace of the robot can be computed ofine, which saves time for the manipulator workspace is dened as the set of all of the robot tool frame (tcp) poses that can be. Dexterity provides dexterous robotic systems for warehouse logistics and supply chain automation.